UM-CV 9 Hardware, Software, PyTorch Modules
Summary: Deep learning hardware, software, and PyTorch modules.
@Credits: EECS 498.007 | Video Lecture: UM-CV 5 Neural Networks
Personal work for the assignments of the course: github repo.
Notice on Usage and Attribution
These are personal class notes based on the University of Michigan EECS 498.008 / 598.008 course. They are intended solely for personal learning and academic discussion, with no commercial use.
For detailed information, please refer to the complete notice at the end of this document
Heep Learning Hardware
GigaFLOPs per Dollar
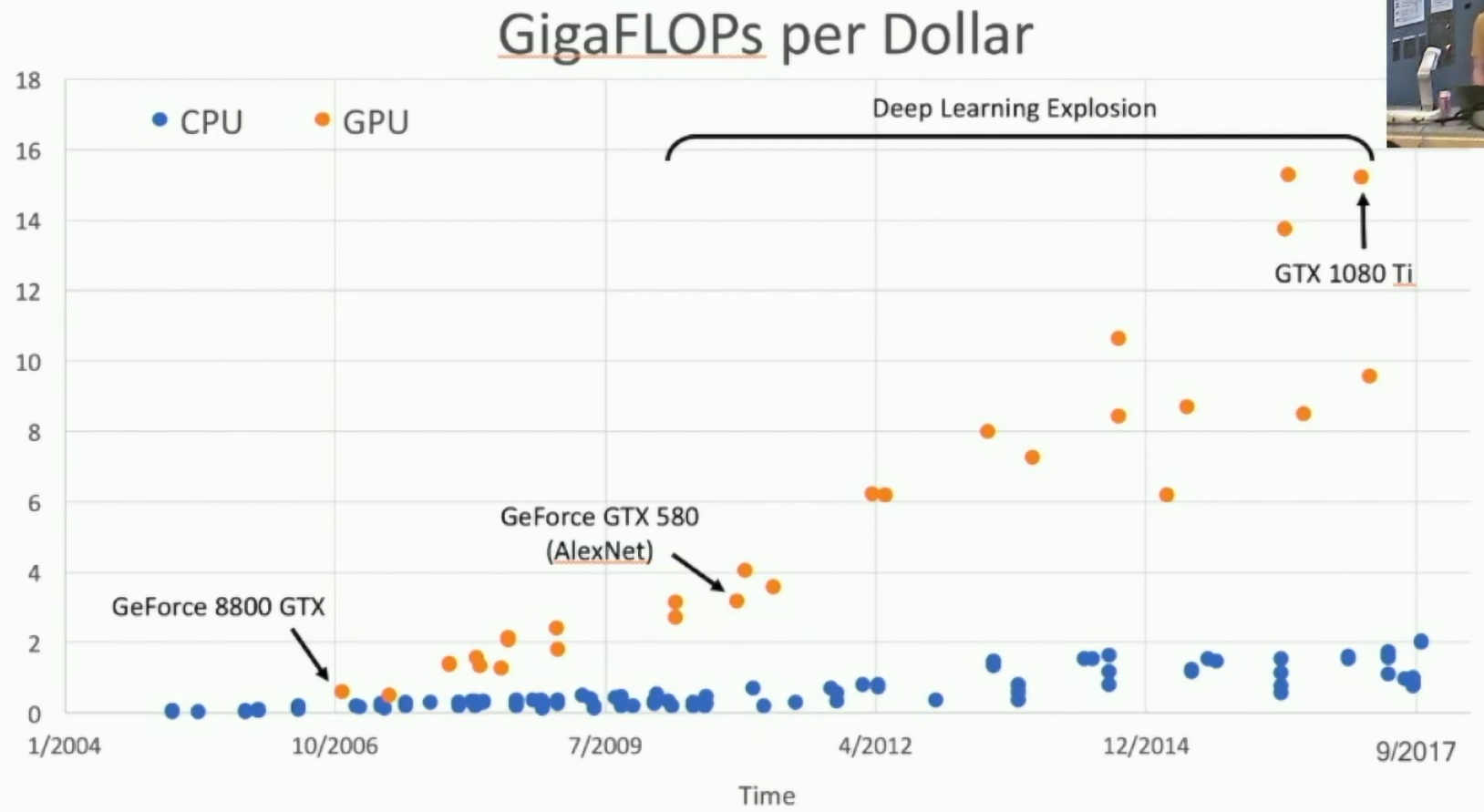
Fig: GigaFLOPS per Dollar
CPU: Fewer cores, but each core is much faster and much more capable; great at sequential tasks
GPU: More cores, but each core is much slower and "dumber"; great for parallel tasks
| CPU vs GPU | Cores | Clock Speed (GHz) | Memory | Price | TFLOP/sec |
|---|---|---|---|---|---|
| CPU Ryzen 9 3950X | 16 (32 threads with hyperthreading) | 3.5 (4.7 boost) | System RAM | $749 | ~4.8 FP32 |
| GPU NVIDIA Titan RTX | 4608 | 1.35 (1.77 boost) | 24 GB GDDR6 | $2499 | ~16.3 FP32 ~130 with Tensor Cores |
Inside a GPU
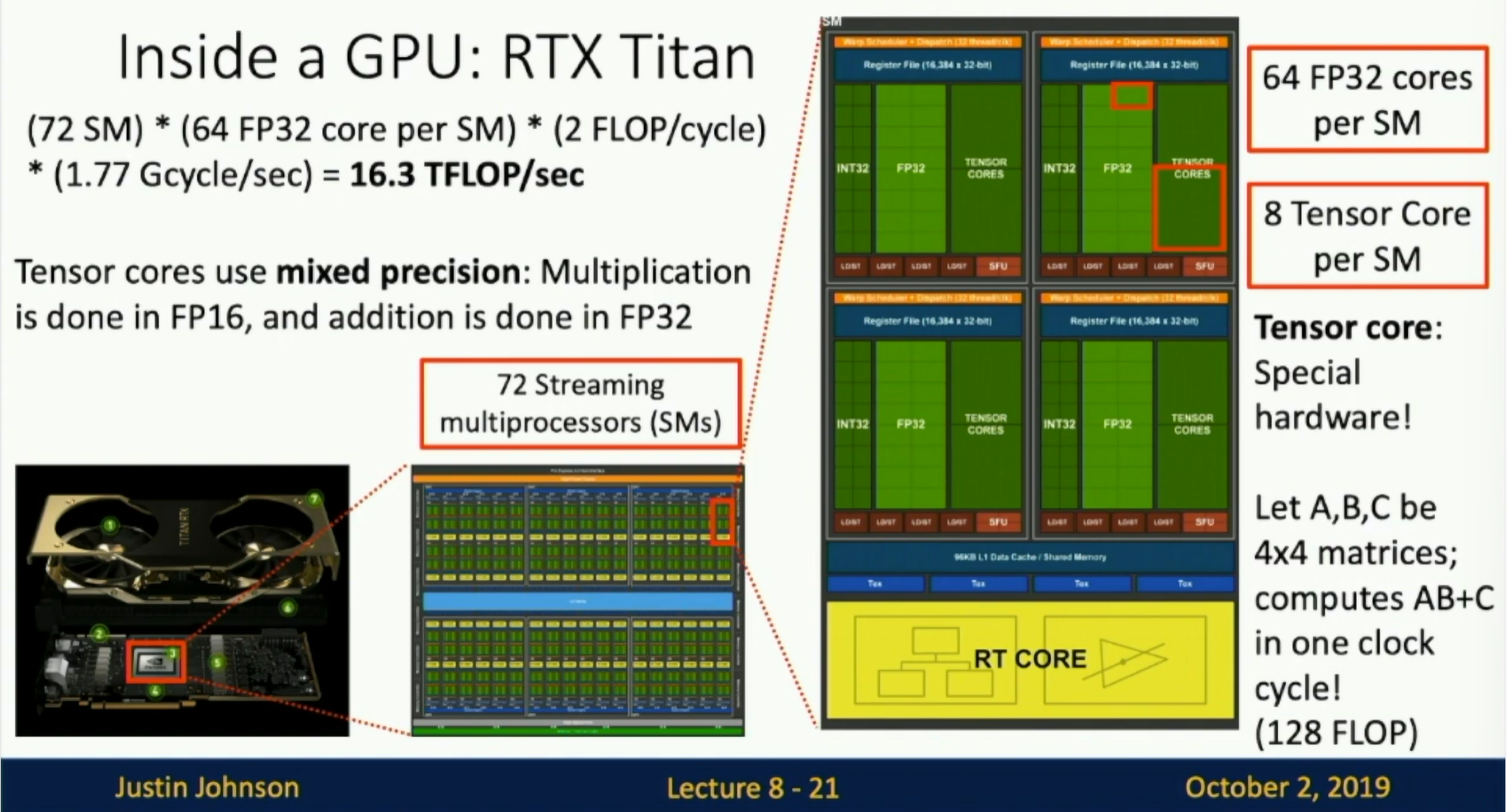
Fig: Inside a GPU
- 12 x 2GB memory modules
- 72 Streaming multiprocessors(SMs)
- Inside each SM:
- 64 FP32 cores per SM
- 8 Tensor Core per SM
- Let A,B,C be 4x4 matrices This computes
C = A x B + Cin one clock cycle (128FLOP/cycle) - The multiplication is done in FP16
- The accumulation is done in FP32
- Let A,B,C be 4x4 matrices This computes
- 4608 FP32 cores in total
- 576 Tensor cores
- 72 SM x 64 cores x 2 FLOP /cycle x 1.77 GHz(Gcycle/sec) = 16.3 TFLOP/sec (FP32)
- 72 SM x 8 Tensor cores x 128 FLOP/cycle x 1.77 GHz(Gcycle/sec) = 130 TFLOP/sec (FP16)
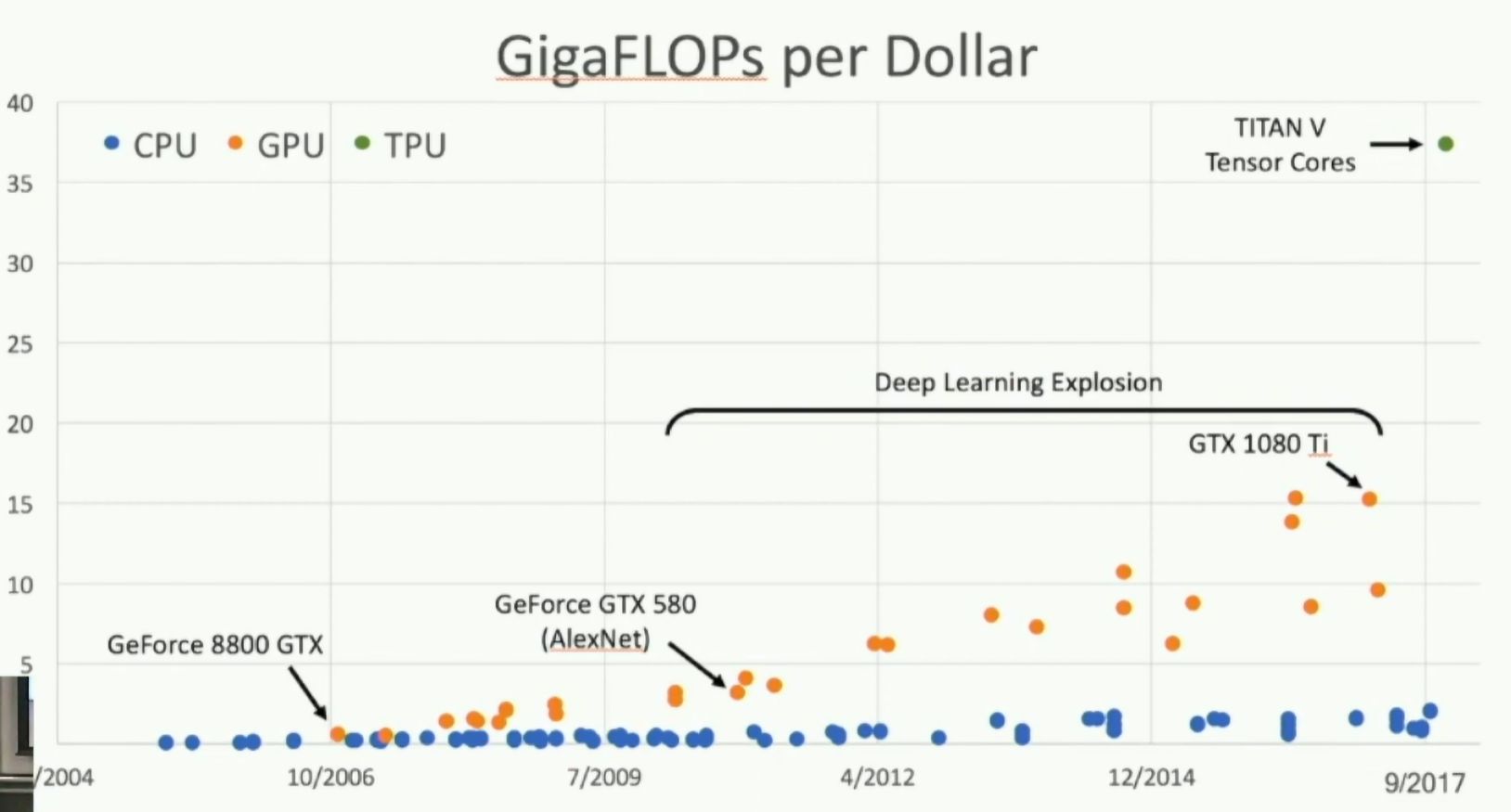
Fig: GigaFLOPs per dollar
How to utilize these cores? Store your tensor in FP16 and use the tensor cores for matrix multiplication.
Parallelism
Example: Matrix Multiplication
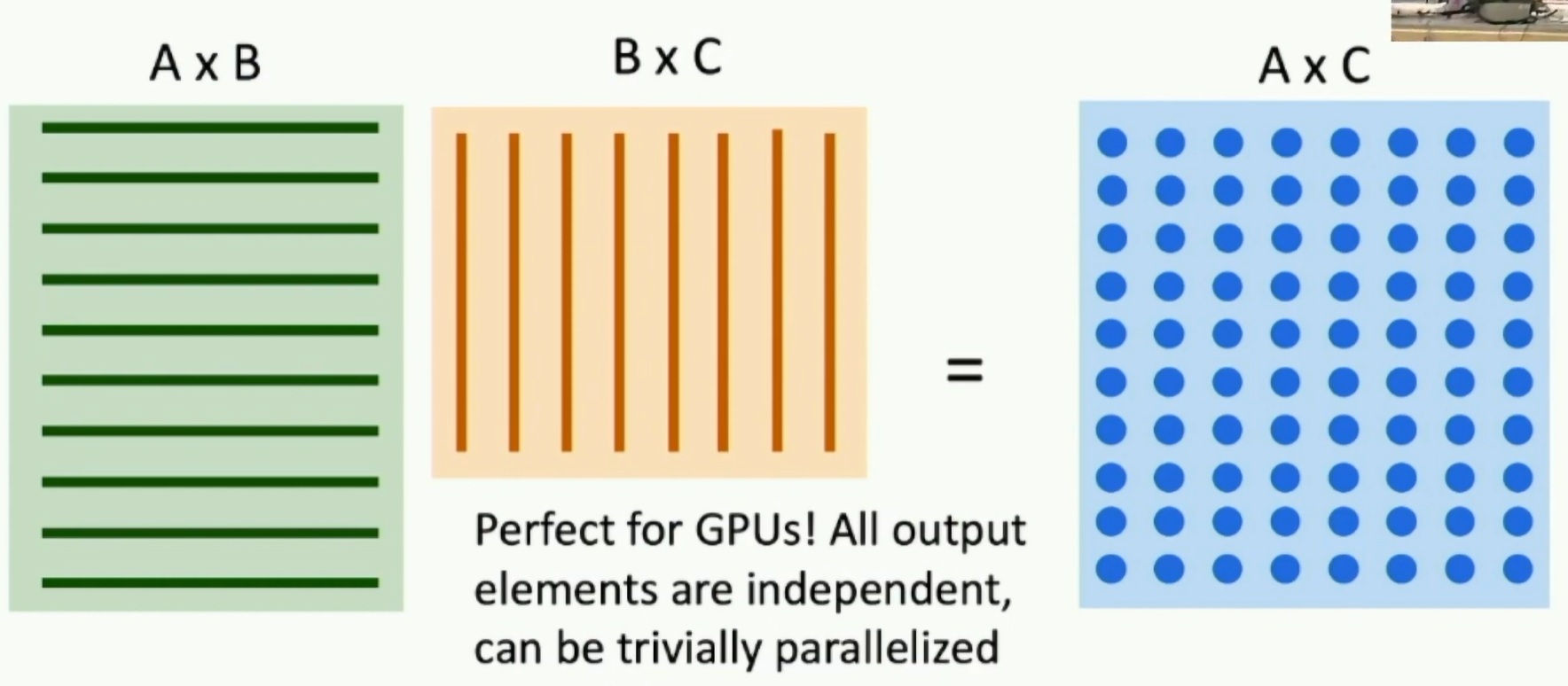
Fig: Matrix Multiplication
- Chunking the matrix into 4x4 blocks
- Powers of 2 are good for parallelism
GPU Programming
- CUDA: NVIDIA only
- Write C code that runs directly on the GPU
- NVIDIA provides optimized APIS: cuBLAS, cuFFT, cuDNN, etc.
- OpenCL
- Similar to CUDA, but runs on anything
- Usually slower on NVIDIA hardware
Scaling up: Typically 8 GPUS per server
Google Tensor Processing Units (TPU)
| Cloud TPU Comparison | Performance (TFLOP/sec) | Memory | Price | Configuration |
|---|---|---|---|---|
| Cloud TPU v2 | 180 TFLOP/sec | 64 GB HBM2 | $4.50/hour | Single TPU |
| Cloud TPU v2 Pod | 11.5 PFLOP/sec | - | $384/hour | 64 TPU-v2 |
| Cloud TPU v3 | 420 TFLOP/sec | 128 GB HBM2 | $8/hour | Single TPU |
| Cloud TPU v3 Pod | 107 PFLOP/sec | - | - | 256 TPU-v3 |
In order to use TPUs, you have to use TensorFlow (in 2019).
The most time consuming part of training a neural network is actually copying and moving data around.
Distributed Training
Model Parallelism: Different parts of the model are on different devices.
Idea 1: Run different layers of the model on different GPUs. Problem: Waiting for the slowest GPU
Idea 2: Run parallel branches of model on different GPUs. Problem: Synchronizing across GPUs
Idea 3: Batch Parallelism: Different batches of data are on different devices. GPU only communicate at the end of each batch.
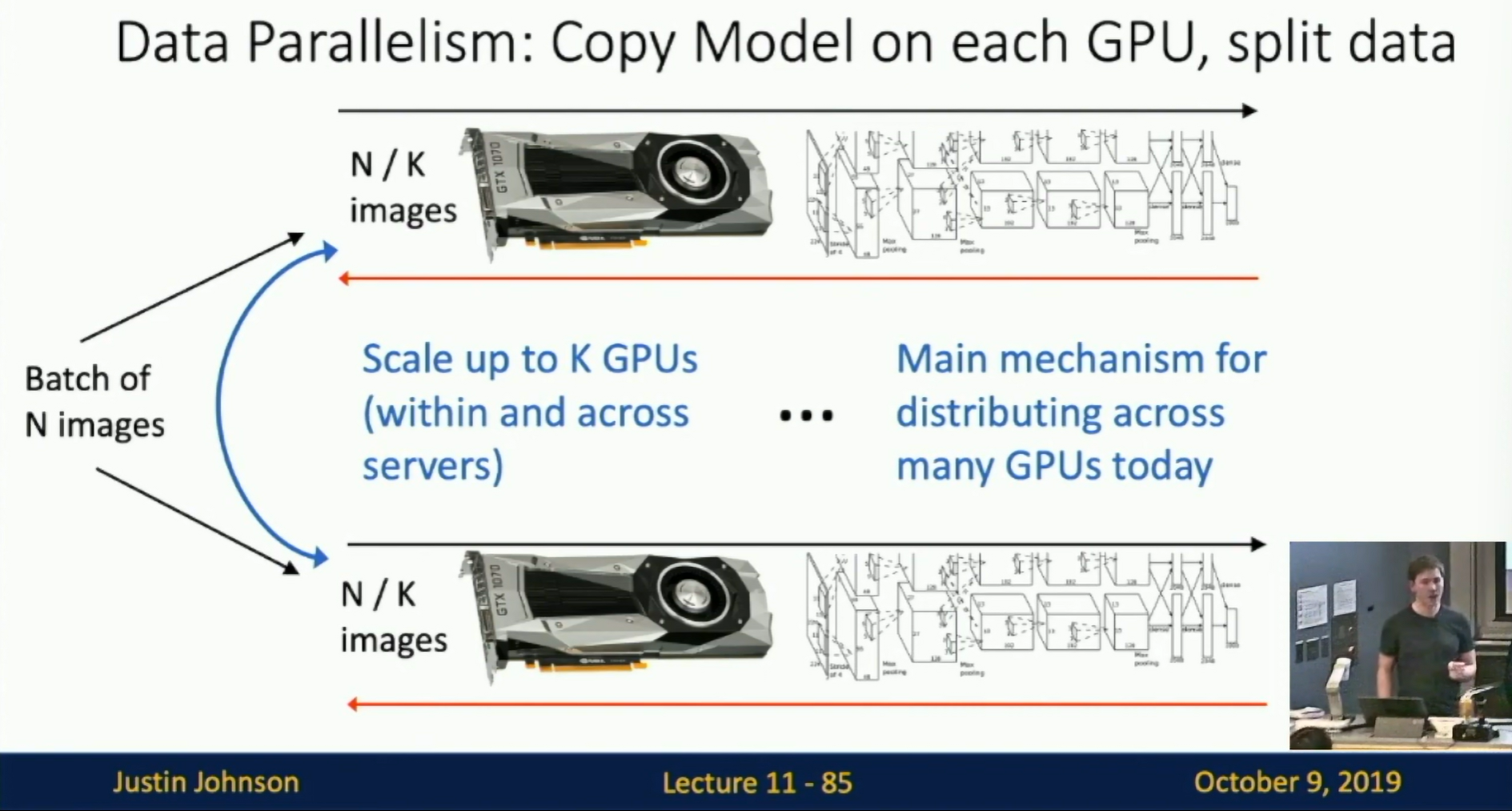
Fig: Distributed Training
Deep Learning Software
PyTorch, Caffe2, TensorFlow, PaddlePaddle, MAXNet, JAX, CNTK, Chainer, etc.
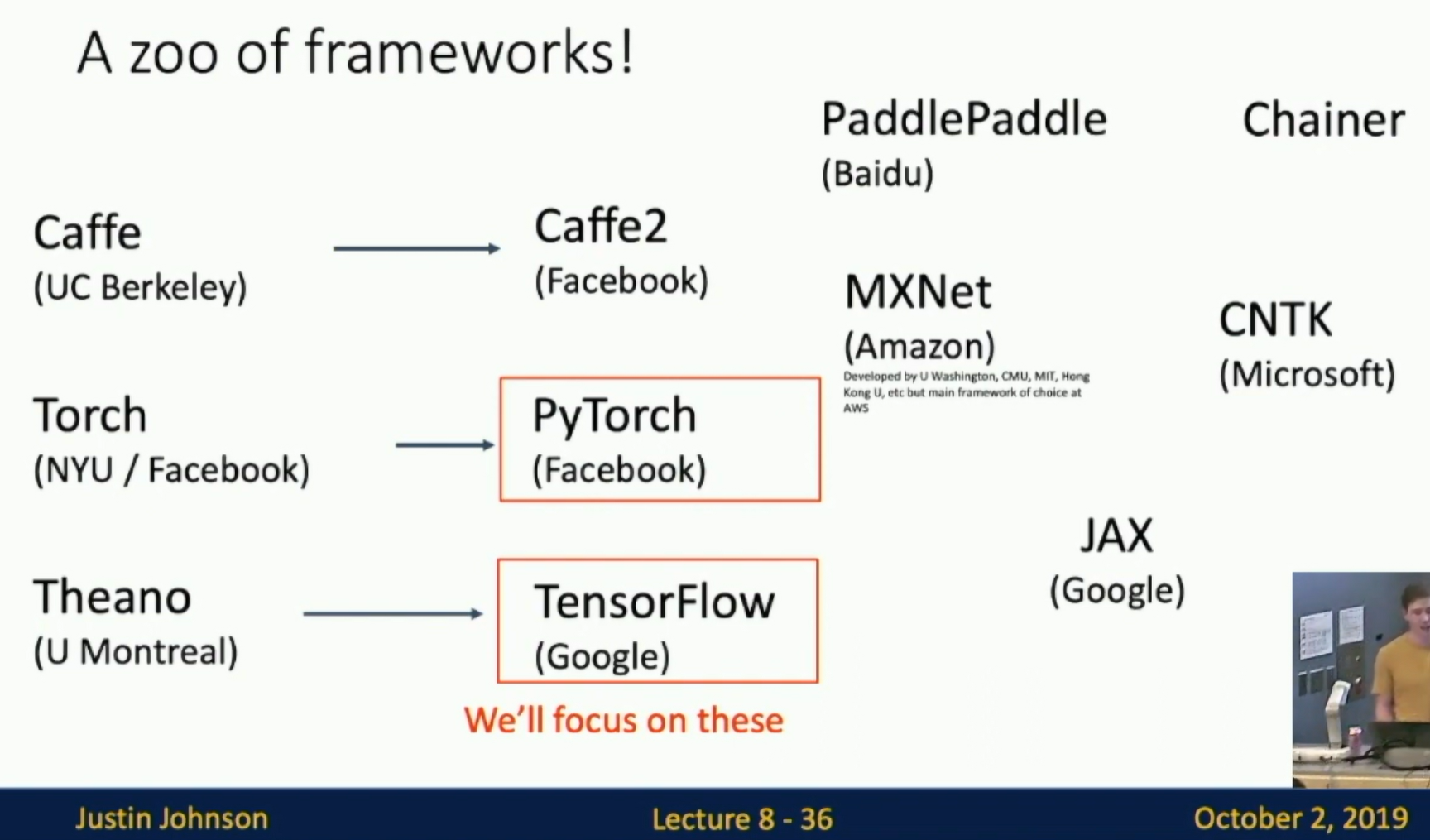
Fig: Deep Learning Software
Recall: Computational Graphs
The point of deep learning frameworks:
- Allow rapid prototyping of new models
- Automatically compute gradients
- Run it all efficiently on GPUs (or TPUs)
PyTorch
Fundamental Concepts
- Tensor
torch.Tensor: The basic data structure (Assignment 1, 2, 3) - Autograd
torch.autograd: Automatic differentiation - Module
torch.nn.Module: Neural network layers; may store state or learnable weights (Assignment 4, 5, 6)
Tensors
Running example: Train a two layer neural network on random data with L2 loss
# @Credits: UMich EECS 498-007 / 598-005 Deep Learning for Computer Vision
import torch
device = torch.device('cuda:0')
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in, device=device)
y = torch.randn(N, D_out, device=device)
w1 = torch.randn(D_in, H, device=device)
w2 = torch.randn(H, D_out, device=device)
learning_rate = 1e-6
for t in range(500):
h = x.mm(w1)
h_relu = h.clamp(min=0)
y_pred = h_relu.mm(w2)
loss = (y_pred - y).pow(2).sum()
# manually compute the gradient
grad_y_pred = 2.0 * (y_pred - y)
grad_w2 = h_relu.t().mm(grad_y_pred)
grad_h_relu = grad_y_pred.mm(w2.t())
grad_h = grad_h_relu.clone()
grad_h[h < 0] = 0
grad_w1 = x.t().mm(grad_h)
w1 -= learning_rate * grad_w1
w2 -= learning_rate * grad_w2Autograd
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
w1 = torch.randn(D_in, H, requires_grad=True)
w2 = torch.randn(H, D_out, requires_grad=True)
learning_rate = 1e-6
for t in range(500):
# ReLU
y_pred = x.mm(w1).clamp(min=0).mm(w2)
# sigmoid activation
y_pred = sigmoid(x.mm(w1)).mm(w2)
# The computational graph is automatically constructed
# Clamp的意思是将小于0的值变为0
loss = (y_pred - y).pow(2).sum()
loss.backward()
# Pytorch searches any leaf nodes in the computational graph
# and computes the gradient of the loss with respect to them
# After backward finishes, gradients are stored in the .grad
# attribute of each tensor and the graph is **destroyed**
with torch.no_grad():
w1 -= learning_rate * w1.grad
w2 -= learning_rate * w2.grad
w1.grad.zero_()
w2.grad.zero_()Implement a new function
class Sigmoid(torch.autograd.Function):
@staticmethod
def forward(ctx, x):
y = 1.0 / (1.0 + (-x).exp())
ctx.save_for_backward(y)
return y
@staticmethod
def backward(ctx, grad_y):
y, = ctx.saved_tensors
grad_x = grad_y * y * (1.0 - y)
return grad_x
def sigmoid(x):
return Sigmoid.apply(x)In practice this is rare.
Module: nn
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out)
)
learning_rate = 1e-2
for t in range(500):
y_pred = model(x)
loss = torch.nn.functional.mse_loss(y_pred, y)
loss.backward()
with torch.no_grad():
for param in model.parameters():
param -= learning_rate * param.grad
model.zero_grad()Optim
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out)
)
learning_rate = 1e-4
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
for t in range(500):
y_pred = model(x)
loss = torch.nn.functional.mse_loss(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()Define your own modules
import torch
class TwoLayerNet(torch.nn.Module):
def __init__(self, D_in, H, D_out):
super(TwoLayerNet, self).__init__()
self.linear1 = torch.nn.Linear(D_in, H)
self.linear2 = torch.nn.Linear(H, D_out)
def forward(self, x):
h_relu = self.linear1(x).clamp(min=0)
y_pred = self.linear2(h_relu)
return y_pred
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = TwoLayerNet(D_in, H, D_out)
optimizer = torch.optim.SGD(model.parameters(), lr=1e-4)
for t in range(500):
y_pred = model(x)
loss = torch.nn.functional.mse_loss(y_pred, y)
loss.backward()
optimizer.step()
optimizer.zero_grad()Example 2: ParallelBlock
import torch
class ParallelBlock(torch.nn.Module):
def __init__(self, D_in, D_out):
super(ParallelBlock, self).__init__()
self.linear1 = torch.nn.Linear(D_in, D_out)
self.linear2 = torch.nn.Linear(D_in, D_out)
def forward(self, x):
h1 = self.linear1(x)
h2 = self.linear2(x)
return (h1*h2).clamp(min=0)
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = torch.nn.Sequential(
ParallelBlock(D_in, H),
ParallelBlock(H, H),
torch.nn.Linear(H, D_out)
)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for t in range(500):
y_pred = model(x)
loss = torch.nn.functional.mse_loss(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()DataLoaders
import torch
from torch.utils.data import DataLoader, TensorDataset
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
loader = DataLoader(TensorDataset(x, y), batch_size=8)
model = TwoLayerNet(D_in, H, D_out)
optimizer = torch.optim.SGD(model.parameters(), lr=1e-4)
for epoch in range(10):
for x_batch, y_batch in loader:
y_pred = model(x_batch)
loss = torch.nn.functional.mse_loss(y_pred, y_batch)
optimizer.zero_grad()
loss.backward()
optimizer.step()Pretrained Models
import torch
import torchvision
alexnet = torchvision.models.alexnet(pretrained=True)
vgg16 = torchvision.models.vgg16(pretrained=True)
resnet101 = torchvision.models.resnet101(pretrained=True)Dynamic Computation Graphs
Dynamic graphs let you use regular Python control flow during the forward pass! This is much more flexible than static graphs.
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
w1 = torch.randn(D_in, H, requires_grad=True)
w2a = torch.randn(H, D_out, requires_grad=True)
w2b = torch.randn(H, D_out, requires_grad=True)
learning_rate = 1e-6
prev_loss = 5.0
for t in range(500):
w2 = w2a if prev_loss < 5.0 else w2b
y_pred = x.mm(w1).clamp(min=0).mm(w2)
loss = (y_pred - y).pow(2).sum()
loss.backward()
prev_loss = loss.item()Static Graphs with JIT
@torch.jit.script
def model(x, y, w1, w2a, w2b, prev_loss):
w2 = w2a if prev_loss < 5.0 else w2b
y_pred = x.mm(w1).clamp(min=0).mm(w2)
loss = (y_pred - y).pow(2).sum()
return lossStatic:
- Once graph is built, we can serialize it and run it without the code that built the graph.
- Lots of indirection between the code you write and the code that runs - can be hard to debug, benchmark, etc.
Dynamic:
- Graph building and execution are intertwined.
- Easier to debug, benchmark, etc.
- Easily implement Recurrent and Recursive networks and other dynamic models.
- Modular Networks: You can train a network to build another network.
TensorFlow is 2.18 (Oct 2024) is moving towards a more dynamic model. Keras is the high level API for TensorFlow.
import tensorflow as tf
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import InputLayer, Dense
N, Din, H, Dout = 16, 1000, 100, 10
model = Sequential()
model.add(InputLayer(input_shape=(Din,)))
model.add(Dense(units=H, activation='relu'))
model.add(Dense(units=Dout))
params = model.trainable_variables
loss_fn = tf.keras.losses.MeanSquaredError()
opt = tf.keras.optimizers.SGD(learning_rate=1e-6)
x = tf.random.normal((N, Din))
y = tf.random.normal((N, Dout))
def step():
y_pred = model(x)
loss = loss_fn(y_pred, y)
return loss
for t in range(1000):
opt.minimize(step, params)Tensorboard
Tensorboard is a visualization tool that comes with TensorFlow. It can be used with PyTorch as well.
import torch
import torch.utils.tensorboardNotice on Usage and Attribution
This note is based on the University of Michigan's publicly available course EECS 498.008 / 598.008 and is intended solely for personal learning and academic discussion, with no commercial use.
- Nature of the Notes: These notes include extensive references and citations from course materials to ensure clarity and completeness. However, they are presented as personal interpretations and summaries, not as substitutes for the original course content.
- Original Course Resources: Please refer to the official University of Michigan website for complete and accurate course materials.
- Third-Party Open Access Content: This note may reference Open Access (OA) papers or resources cited within the course materials. These materials are used under their original Open Access licenses (e.g., CC BY, CC BY-SA).
- Proper Attribution: Every referenced OA resource is appropriately cited, including the author, publication title, source link, and license type.
- Copyright Notice: All rights to third-party content remain with their respective authors or publishers.
- Content Removal: If you believe any content infringes on your copyright, please contact me, and I will promptly remove the content in question.
Thanks to the University of Michigan and the contributors to the course for their openness and dedication to accessible education.